---
task_categories:
- object-detection
tags:
- yolo
- yolo11
- hardhat
- hat
datasets:
- luisarizmendi/safety-equipment
base_model:
- Ultralytics/YOLO11
widget:
- src: >-
https://huggingface.co/datasets/mishig/sample_images/resolve/main/football-match.jpg
example_title: Football Match
- src: >-
https://huggingface.co/datasets/mishig/sample_images/resolve/main/airport.jpg
example_title: Airport
pipeline_tag: object-detection
model-index:
- name: yolo11-safety-equipment
results:
- task:
type: object-detection
dataset:
type: safety-equipment
name: Safety Equipment
args:
epochs: 35
batch: 2
imgsz: 640
patience: 5
optimizer: SGD
lr0: 0.001
lrf: 0.01
momentum: 0.9
weight_decay: 0.0005
warmup_epochs: 3
warmup_bias_lr: 0.01
warmup_momentum: 0.8
metrics:
- type: precision
name: Precision
value: 0.9078
- type: recall
name: Recall
value: 0.9064
- type: mAP50
name: mAP50
value: 0.9589
- type: mAP50-95
name: mAP50-95
value: 0.6088
---
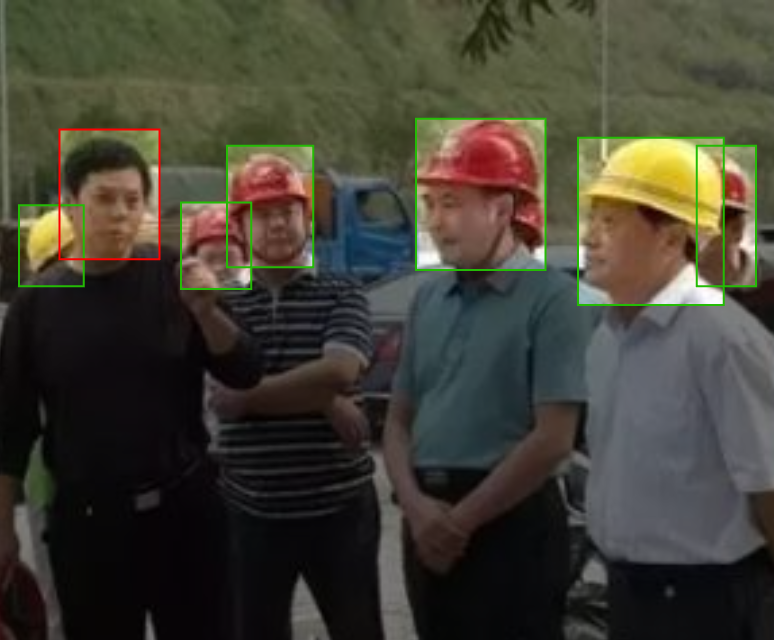
# Model for detecting Hardhats and Hats
## Model binary
You can [download the model from here](https://github.com/luisarizmendi/ai-apps/raw/refs/heads/main/models/luisarizmendi/object-detector-safety/object-detector-safety-v1.pt)
## Labels
```
- hat
- helmet
- no_helmet
```
## Model metrics
## Model Dataset
[https://universe.roboflow.com/luisarizmendi/hardhat-or-hat](https://universe.roboflow.com/luisarizmendi/hardhat-or-hat)
## Model training
### Notebook
You can [review the Jupyter notebook here](https://huggingface.co/luisarizmendihardhat-or-hat/blob/main/train.ipynb)
### Hyperparameters
```
epochs: 35
batch: 2
imgsz: 640
patience: 5
optimizer: 'SGD'
lr0: 0.001
lrf: 0.01
momentum: 0.9
weight_decay: 0.0005
warmup_epochs: 3
warmup_bias_lr: 0.01
warmup_momentum: 0.8
```
### Augmentation
```
hsv_h=0.015, # Image HSV-Hue augmentationc
hsv_s=0.7, # Image HSV-Saturation augmentation
hsv_v=0.4, # Image HSV-Value augmentation
degrees=10, # Image rotation (+/- deg)
translate=0.1, # Image translation (+/- fraction)
scale=0.3, # Image scale (+/- gain)
shear=0.0, # Image shear (+/- deg)
perspective=0.0, # Image perspective
flipud=0.1, # Image flip up-down
fliplr=0.1, # Image flip left-right
mosaic=1.0, # Image mosaic
mixup=0.0, # Image mixup
```
## Usage
### Usage with Huggingface spaces
If you don't want to run it locally, you can use [this huggingface space](https://huggingface.co/spaces/luisarizmendi/safety-equipment-object-detection) that I've created with this code but be aware that this will be slow since I'm using a free instance, so it's better to run it locally with the python script below.
### Usage with Python script
Install the following PIP requirements
```
gradio
ultralytics
Pillow
opencv-python
torch
```
Then [run the python code below](https://huggingface.co/luisarizmendi/yolo11-safety-equipment/blob/main/run_model.py) and then open `http://localhost:7860` in a browser to upload and scan the images.
```
import gradio as gr
from ultralytics import YOLO
from PIL import Image
import os
import cv2
import torch
def detect_objects_in_files(files):
"""
Processes uploaded images for object detection.
"""
if not files:
return "No files uploaded.", []
device = "cuda" if torch.cuda.is_available() else "cpu"
model = YOLO("https://github.com/luisarizmendi/ai-apps/raw/refs/heads/main/models/luisarizmendi/object-detector-safety/object-detector-safety-v1.pt")
model.to(device)
results_images = []
for file in files:
try:
image = Image.open(file).convert("RGB")
results = model(image)
result_img_bgr = results[0].plot()
result_img_rgb = cv2.cvtColor(result_img_bgr, cv2.COLOR_BGR2RGB)
results_images.append(result_img_rgb)
# If you want that images appear one by one (slower)
#yield "Processing image...", results_images
except Exception as e:
return f"Error processing file: {file}. Exception: {str(e)}", []
del model
torch.cuda.empty_cache()
return "Processing completed.", results_images
interface = gr.Interface(
fn=detect_objects_in_files,
inputs=gr.Files(file_types=["image"], label="Select Images"),
outputs=[
gr.Textbox(label="Status"),
gr.Gallery(label="Results")
],
title="Object Detection on Images",
description="Upload images to perform object detection. The model will process each image and display the results."
)
if __name__ == "__main__":
interface.launch()
```